| Робот - домашний помощник |
| Автоматизация - Робототехника |
|
Сегодня одной из проблем, стоящей перед домашними роботами, является отсутствие связи между роботами и бытовой техникой, например стиральной машиной, кухонной плитой и т.п. Так, сегодняшнему среднестатистическому роботу пока сложно выполнять бытовые обязанности: уборка пола; уборка и складывание разбросанных предметов и одежды; загрузка стиральной машины; мытье посуды; нахождение в закрытом ящике лекарств для владельца. На данный момент, Токийский университет IRT занимается разработкой такого проекта, который, в том числе, финансируется Toyota, Olympus, SEGA, Toppan, Fujitsu, Panasonic, Mitsubishi. Это сотрудничество не ограничивается простым финансированием, так, Toyota производит компонентов, а Fujitsu помогает в разработке софта. убирает одежду в стиральную машину, передвигает стул и работает со шваброй. Характеристики робота. - 32 степени свободы. Двигается на шести колесах. - Рост – 155 см (другие размеры – 65×70 см). - Вес – 130 кг. - Система ориентации. Имеет в общей сложности пять камер: из них – две широкоугольные стереокамеры, две телескопические камеры. Имеется лазерный дальномер и ультразвуковой датчик, которые используются для обнаружения различных объектов, а также датчики давления. Кроме того, робот при своих передвижениях строит 3-D карту, с помощью которой неплохо ориентируется в окружающем пространстве. - Продолжительность работы аккумулятора примерно 30-60 минут. Это – коммерческий проект и предполагается массовое производство роботов в ближайшие 10-20-ть лет, по цене примерно $ 10000 за робота. Разработчики надеются к тому времени значительно улучшить своих роботов. |

| Читайте: |
|---|
Теория АСУ:
Теория автоматического управления ТАУ Теория автоматического управления (ТАУ) изучает принципы построения систем автоматического управления и закономерности протекающих в них процессов, которые она исследует на динамических моделях дейс... |
Техника безопасности при эксплуатации и ремонте приборов и средств автоматизации Электрические приборы и средства автоматизации, приборы, устанавливаемые во взрывоопасных помещениях и наружных установках, должны удовлетворять требованиям Правил устройства электроустановок (ПУЭ).... |
Кодирования состояния механизации и автоматизации технологических операций Для кодирования состояния механизации и автоматизации технологических операций в маршрутных картах технологических процессов предлагается воспользоваться двоичным алфавитом, который широко распростр... |
Каскадное регулирование (cascade control) Классический пример. Нагреватель печи (горелка в нашем случае) имеет избыточную мощность, и объект нагрева (заготовка) может с одной стороны перегреться, а с другой - остаться холодным. Если подобны... |
Основные принципы и правила построения схем управления и сигнализации Принципиальные электрические схемы отражают принципы действия систем управления, сигнализации, измерения, регулирования и взаимодействие между отдельными элементами системы, а также способ электропи... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм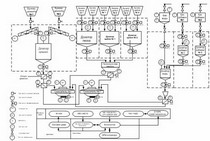 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Основные функции системы управления комбикормовым завод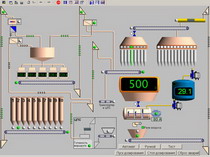 Система управления производством комбикормов предназначена для автоматизации управления всем технологическим оборудованием комби... |
Автоматизированная система управления технологическим п Введение В 2004 - 2005 году специалистами ООО НПФ Ракурс проводились работы по созданию автоматизированной системы управле... |






