| Робот ACTUV будет охотиться в океане на субмарин |
| Автоматизация - Робототехника |
|
Пока американские ученые запускают исследовательских роботов в глубины океана, американские военные собираются запустить роботы корабли на его поверхности. Управление перспективных исследований Министерства обороны США (DARPA) начало разрабатывать проект автономного сторожевого корабля, который способен много месяцев бороздить океанские просторы без людей на борту. Проект получил название ACTUV (Anti-submarine warfare Continuous Trail Unmanned Vessel - Военный беспилотный корабль постоянной противолодочной охоты). Как следует из названия, этот сторожевой предназначен в первую очередь для обнаружения подводных лодок. С этой целью ACTUV будет оснащен мощным локатором. Предполагается, что судно робот будет долгое время в автономном режиме прочесывать океан, сканируя его глубины. Как только корабль обнаружит субмарину, он «садится ей на хвост» и, передав сигнал на базу, просто ведет подводную лодку. Использование подобных надводных океанских роботов позволит высвободить обычные сторожевые корабли. На данном этапе разработчики пытаются преодолеть две существенные проблемы. Первая – это как избежать столкновения робота ACTUV с другими кораблями в открытом водном пространстве. Вторая проблема – это развитие способности автономного сторожевого корабля улавливать сигналы субмарин с дизельно-электрическими двигателями. На сегодняшний день подводные лодки такого типа считаются практически бесшумными. |

| Читайте: |
|---|
Теория АСУ:
Отопление - позитивные изменения последних лет Недавно встретил школьного приятеля, которого не видел лет семь-восемь, и удивился - как он успел измениться за эти годы. При этом другой школьный друг, с которым я общался на протяжении этих лет по... |
Малобюджетный вариант СМС-диспетчеризации. Контроллер РС-420, работающий по GSM Одним из направлений работы компании Контэл (г. Владимир) является разработка и производство систем, программного обеспечения и приборов для мониторинга промышленных объектов, работающих без постоян... |
Диспетчеризация подсистемы вентиляции и кондиционирования Данная подсистема осуществляет контроль и управление, на основе сигналов, поступающих от датчиков влажности, температуры, содержания углекислого газа и пыли в воздухе. Зачастую подобные устройства м... |
Диспетчеризация лифтового хозяйства Диспетчеризация лифтового хозяйства позволяет: · значительно повысить оперативность в обслуживании лифтовым оборудованием; · своевременно получать сигналы о каких-либо повреждения и сбоях в ... |
Дифференциальная составляющая Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, как бы предугадывая поведение объекта в будущем. Эти отклонения могут быть спровоцированы внешними во... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм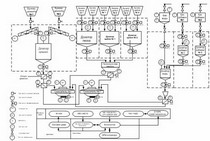 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Автоматизация цеха по производству яичного порошка Объектом автоматизации является цех по производству яичного порошка Кобринской птицефабрики (Республика Беларусь, Брестская обл.... |
Автоматизация комплекса зданий Объект: Автоматизация комплекса зданий (22 корпуса жилых и служебных помещений, пос. Солнечное Ленинградской области), принадлеж... |