| Подводных роботов в мире стало на три меньше |
| Автоматизация - Робототехника |
|
Американские военные потеряли подводных роботов. Дело было в июне в Чесапикском заливе неподалеку от Норфолка во время крупных военно-морских учений, которые проводили подразделения армий США и Канады. По тактическому заданию 13 роботов REMUS 100 Swordfish должны были обследовать морское дно в поисках учебных подводных мин. Девять роботов успешно справились с заданием, а вот четыре неожиданно канули в морской пучине, не подавая сигналов. В результате часть военно-морских судов и вертолетов вместо выполнения боевых тактических задач была переброшена на поиски роботов. Кроме того к ним присоединились и специальные подразделения, которые используют для поиска мин морских львов и дельфинов. Частично труды были не напрасны – один робот нашелся. Роботы REMUS являются наиболее популярной маркой автономных необитаемых подводных аппаратов, которые используют военные в 13 странах НАТО и некоторых других государств. Пока это единственные подводные роботы, которые принимали участие в боевых действия. Американцы использовали их для обследования морского побережья во время войны в Ираке. REMUS-ы выпускает американская компания Hydroid. Оптимально роботы погружаются на глубину до 90 метров и предназначены для обследования прибрежных вод на случай обнаружения мин и исследования морского дна. Подводный робот REMUS имеет полтора метра в длину, 19 сантиметров в диаметре и 36 килограмм веса. Их специально делают максимально малозаметными в воде. Поэтому неудивительно, что при отказе электроники визуально или с помощью эхалотов обнаружить роботов американцам так и не удалось. Военные предполагают, что роботы могли самостоятельно опуститься на большую глубину, чем предусмотрено техническими характеристиками. Это и стало причиной потери контроля. По приблизительным подсчетам всего в мире используется сейчас около 630 подводных роботов. Теперь их стало на три меньше! |

| Читайте: |
|---|
Теория АСУ:
Подсистема централизованного контроля Подсистема централизованного контроля основных режимных параметров и состояния технологического оборудования предназначена для текущего информирования диспетчера и руководства завода о ходе процессо... |
Показатели уровня механизации и автоматизации Показатели уровня механизации и автоматизации можно распределить на два больших класса: структурные и функциональные, которые оценивают по показателям либо структуры, либо процесса функционирования ... |
Основные принципы и правила построения схем автоматизации Схема автоматизации является документом, определяющим структуру и характер автоматизации технологического объекта и оснащение его устройствами контроля и управления. При выполнении схем автоматиз... |
Общность управления процессов в технике Н. Винеру принадлежала мысль об общности процессов управления в технике, живых организмах и в экономике и необходимости совместной деятельности учёных различных специальностей. Этот вывод подготовля... |
О проблемах качества Но большое разнообразие имеет не только достоинства, но и порождает массу проблем. Я имею в виду не только то, что глаза разбегаются, но и отсутствие объективной информации по предлагаемой технике. ... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм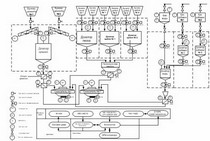 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Особенности реализации алгоритмов контроля и управления Алгоритмическое обеспечение АСУТП включает в свой состав набор алгоритмов, охватывающих все узлы и задачи ВПУ. Все алгоритмы ... |
Автоматизация установки ПЭВ для определения моющих свой Одноцилиндровая установка ПЗВ предназначена для определения моющих свойств моторных масел с присадками путем испытания масла на ... |