| Куб стоит на вершине, а робот не дает ему упасть |
| Автоматизация - Робототехника |
|
Строго говоря, балансирующий куб как-то не очень напоминает сам куб. И тем более не напоминает робота в общепринятом представлении. Эту лучеобразную конструкцию создатели назвали кубом, потому что сделанные из алюминия трубки являются внутренним каркасом объемной геометрической фигуры. А к роботам её можно отнести по своим свойствам: балансирующий куб может устойчиво стоять на любой из своих граней или вершин. С точки зрения практического применения конструкцию роботостроителей из Цюриха (Германия) можно отнести к автоматизированной скульптуре. Однако, не все так просто. Идею создания балансирующего робота Рафаэлю де Андрея (Raffaello D'Andrea), Себасьяну Тримп (Sebastian Trimpe) и Марти Донован (Matt Donovan) подсказал один из аттракционов всемирно известного канадского цирка Cirque du Soleil. Цирковые акробаты на глазах у зрителей выстраивали такие пирамиды, что с точки зрения обывателя «конструкция» из множества человеческих тел никак не могла держаться в равновесии. И тогда ученые решили выяснить возможный предел балансировки. За образец взяли куб, на каждой стороне которого закреплен самостоятельно работающий модуль, очень похожий на подвижный маховик. Внутри маховика - электродвигатель, батарея питания, компьютер и два датчика (акселерометр оси тримарана и гироскоп нормы оси тримарана). Таких модулей-маховиков всего шесть. Блок «централизованного диспетчера» координирует показания всех датчиков таким образом, что каждый модуль самостоятельно выбирает режим и способ движения двигателя для маховика. В результате куб со стороной 1.2 метра достаточно устойчиво может удерживаться на любой своей грани или вершине. Это видно на видео. Правда, если толчок будет достаточно сильным, конструкция все-таки упадет. Для изучения именно этого «момента» и «количества» силы и была изначально сконструирована эта роботизированная конструкция. В идеале по такому же принципу можно создать не только куб, но и любую другую фигуру. |

| Читайте: |
|---|
Теория АСУ:
Модульные ПЛК MATCHBOX компании «Контэл» Это распределённый контроллер, в состав которого входят: модуль центрального процессора, модули входов/выходов, модули питания и коммуникационные модули. Передача данных между модулями осуществляетс... |
Использование знаний Отмечается также развитие и системной интеграции. Руководители современных компаний начинают осознавать, что созданные собственными силами в кустарных условиях информационные системы не могут удовле... |
Щиты и пульты контроля и управления Средства контроля и управления технологическим процессом и вспомогательные устройства размещаются на щитах и пультах систем автоматизации, устанавливаемых вблизи технологического оборудования либо в... |
Дифференциальная составляющая Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, как бы предугадывая поведение объекта в будущем. Эти отклонения могут быть спровоцированы внешними во... |
Классификация АСУ ТП В зарубежной литературе можно встретить довольно интересную классификацию АСУ ТП, в соответствие с которой все АСУ ТП делятся на три глобальных класса: • SCADA (Supervisory Control and Data Acqui... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм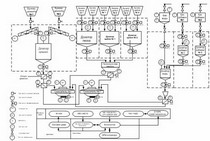 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
Автоматизированная система управления технологическим п Введение В 2004 - 2005 году специалистами ООО НПФ Ракурс проводились работы по созданию автоматизированной системы управле... |
Автоматизация установок ИКМ и ИМ-1 для контроля антиоки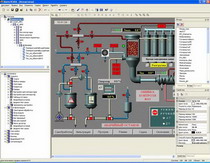 Установки ИКМ предназначены для оценки антиокислительных свойств масел по методу ГОСТ 20457-75, а на ИМ-1 проводятся моторные и... |