| Американцы включили робота в состав космического экипажа |
| Автоматизация - Робототехника |
|
Про уникальные способности робота Robonaut 2 мы уже писали. Разработчики из NASA и General Motors представили его еще в феврале 2010 года. Тогда же прозвучало сообщение, что в перспективе робот будет помогать астронавтам в космосе. На минувшей неделе представители NASA официально объявили, что Robonaut 2 войдет в состав экипажа космического челнока «Дискавери», который в сентябре 2010 года отправится к Международной Космической Станции. По замыслу исследователей робот будет выполнять несложные процедуры, которые необходимо и одновременно неудобно выполнять астронавтам. Именно поэтому разработчики уделили так много внимания рукам робота. Каждая обладает 14 степенями свободы и снабжена множеством датчиков. По своим функциональным возможностям они вполне схожи с руками скрипача или пианиста. Во время тестовых испытаний Robonaut 2 аккуратно складывал бумажные листы, доставал «письма» из конвертов и безупречно выполнял множество разных манипуляций с хрупкими предметами. В то же время на вытянутой руке робот вполне может удерживать груз до 9 килограмм. По внешнему виду он напоминает фантастического мотоциклиста без ног: вместо головы – шлем, вместо нижних конечностей – мобильная платформа. Да и зачем роботу ноги в невесомости?! Сейчас исследователи проверяют, как Robonaut 2 будет «чувствовать себя» в безвоздушном пространстве при наличии большого радиационного фона. Стоит учитывать еще и огромные физические перегрузки, которым подвергаются астронавты при запуске космического корабля. Например, чтобы проверить, как их будет переносить робот, его в разобранном виде долго трясли в специальном шейкере. Если испытания робота на орбитальной станции пройдут успешно, в следующий раз его вполне могут выпустить в открытый космос. И без скафандра, который значительно усложняет свободу действий астронавтов! Вот только сможет ли робонавт делать за бортом то, что делают люди? |

| Читайте: |
|---|
Теория АСУ:
Технические средства автоматизации производств История развития технических средств автоматизации а также сформировавшаяся структура определяющаяся их назначением. Средства формирования, передачи, первичной обработки и автоматического извлечения... |
Подсистема ввода/вывода Подсистема ввода/вывода – состоит из аппаратных модулей ввода/вывода. Модули различаются по типу электрического сигнала (с помощью которого они взаимодействуют с полевыми приборами) и по направлению... |
Принцип погодозависимого регулирования Поясним, каким образом осуществляется поддержание комнатной температуры с учетом изменений уличной. При настройке контроллера устанавливается так называемая температурная кривая, отражающая зависимо... |
Модульные ПЛК MATCHBOX компании «Контэл» Это распределённый контроллер, в состав которого входят: модуль центрального процессора, модули входов/выходов, модули питания и коммуникационные модули. Передача данных между модулями осуществляетс... |
Погрешность Систематические погрешности выражаются в виде разности результатов измерения рабочим и образцовым прибором. Эти разности, взятые с обратным знаком, составляют таблицу поправок к показаниям прибора. ... |
Оборудования в АСУ:
Многокомпонентное дозирование в приготовлении комбикорм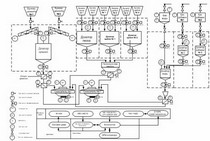 Недавно началась промышленная эксплуатация завода ЗАО «Неокорм» по производству премиксов в г. Лакинск Владимирской области.[1] ... |
Некоторые особенности дозаторов Дозаторы инертных материалов песка и щебня (рис.3.) имеют ряд особенностей. Дозирующие заслонки установлены на раме с возможнос... |
Управление процессом:
АСУ ТП базы ХКМ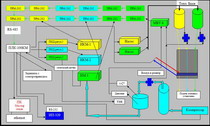 База приема и раздачи раствора хлористого кальция модифицированного (ХКМ), используемого для предотвращения обледенения улиц в з... |
Автоматизированная система управления мобильным центром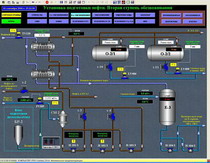 Характеристика объекта управления: МЦОД имеетряд преимуществ по сравнению со стандартным дата-центром, таких как: мобильность, в... |